Student : Laura Vrenken
Supervisor : Arjan Habraken, Faas Moonen, Matthew Fergusson
Introduction
The construction industry nowadays is facing many challenges to reduce its environmental impact and to become more efficient, sustainable and safe. One way to help tackle these challenges is to use more automation. This project focusses on automating timber construction. The goal of the project is to design, engineer and robotically assemble a parametric timber structure.
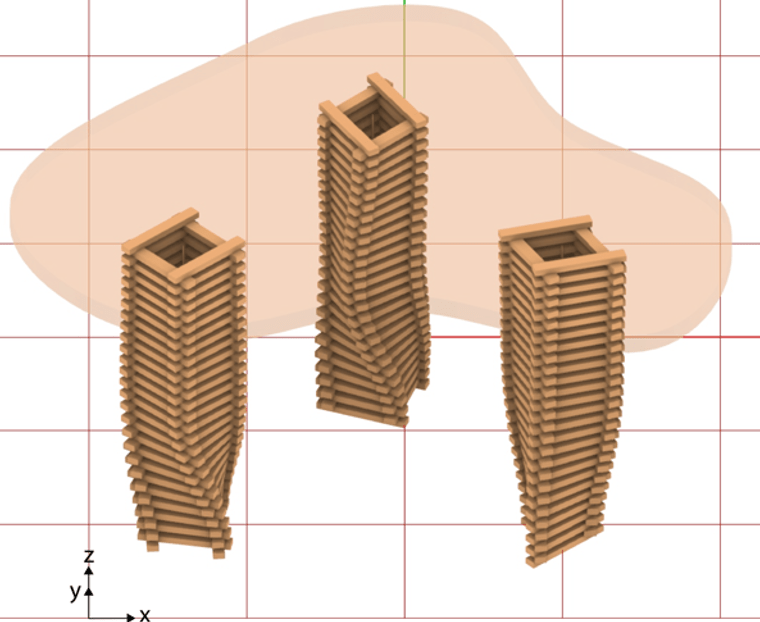
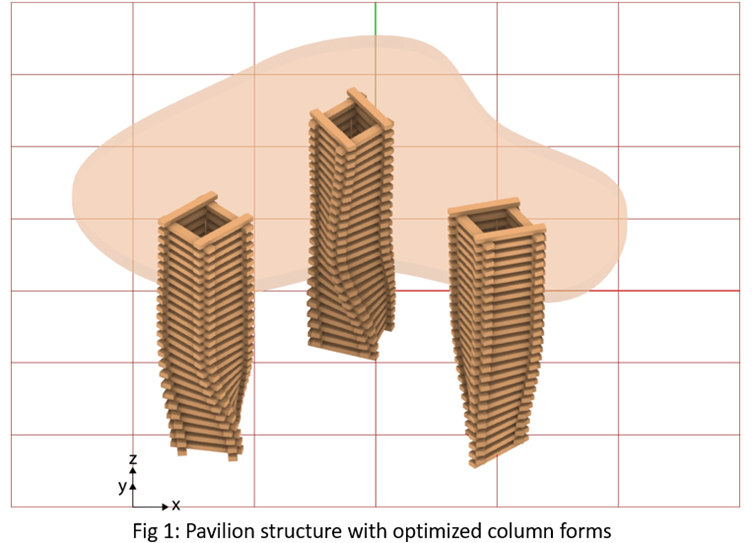
Parametric design
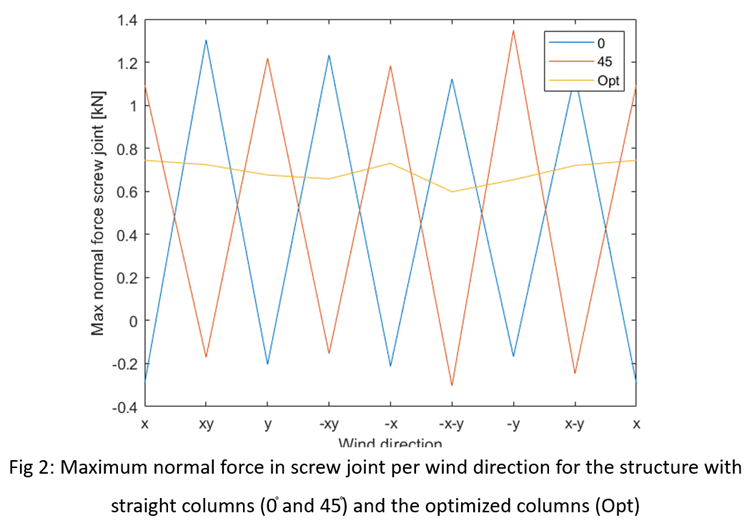
The structure is a pavilion which consists of three columns with beams stacked two by two on top of each other. By changing the angle at which these beams are stacked, the column form can be changed. An optimization is done on the structure, where the forms of the three individual columns are optimized. The forms are optimized by minimizing the most critical force: tension in the screw joints. The optimization process reduces the tension by approximately 43%, compared to a structure with simple straight columns, either rotated 0֯ or 45֯. This reduction in tension force is achieved by balancing wind surface area in every direction and by dividing the tension more equally over the joints.
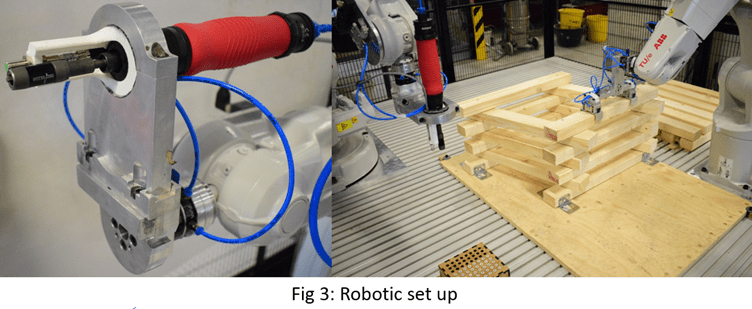
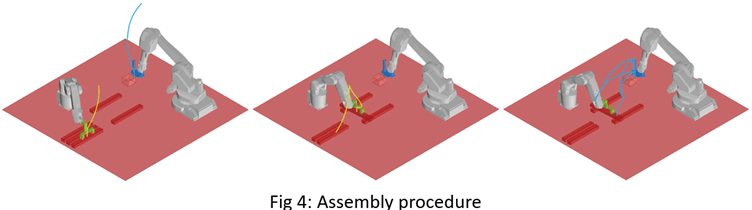
Robotic construction
The robotic set up consists of two robots that work together. One robot picks and places timber beams in the correct position with a pneumatic gripper. The other robot connects the timber beams with screws. To do this, a robotic screwing end effector is developed with a pneumatic screw machine, a magnetic screw holder with ring magnet and a capacitive proximity sensor. The robot can pick up and place screws easily due to the magnetic screw holder. To screw, the robot moves downwards with a controlled velocity and stops when the sensor indicates that the screw is deep enough inside the timber. The robots can work safely together by using multi move, careful path planning and collision checks.
.
In total 188 screws and 102 beams are placed. The success rate of all different construction steps combined is 96.3%. A video of the construction process can be found here:

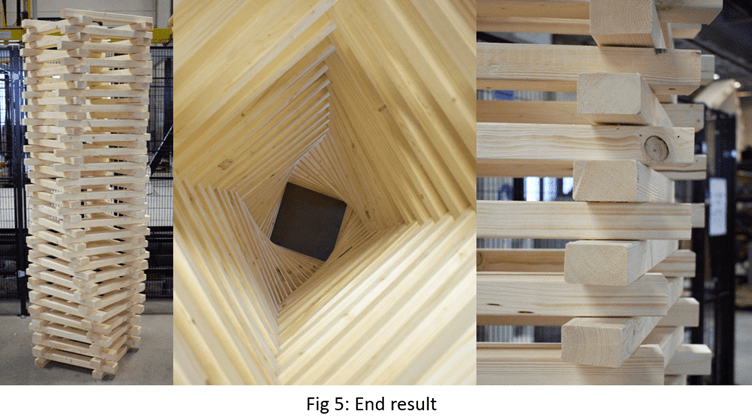
Result
The result is a full size, robotically constructed, structurally optimized, parametric timber column. Also, a working robotic set up is created in which timber structures can be screwed together.