Student : Lotte Krijnen
Supervisor : Arjan Habraken, Faas Moonen, Matthew Fergusson
PROJECT
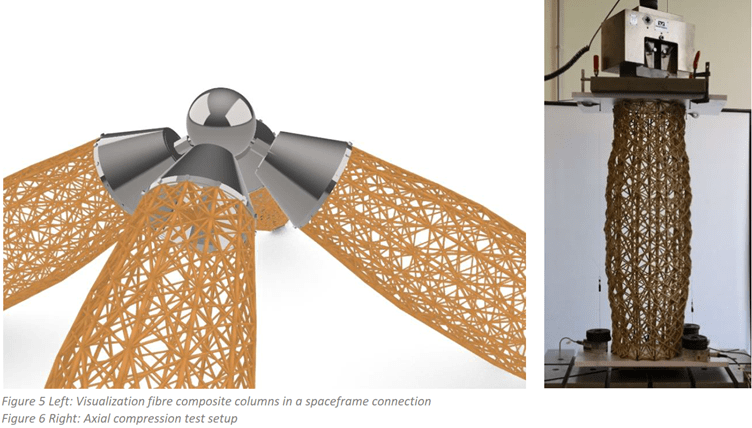
The aim of this research project was to design an optimized three-dimensional lightweight structure to transfer an axial compressive force, and to manufacture this structure by robotic filament winding of resin impregnated bio-based sisal rope. The one meter heigh structural element is simply supported and should be able to be placed in a spaceframe. The project is part of the Innovative Structural Engineering and Design (ISD) field and focuses on minimizing material use and integrating architectural and structural design.
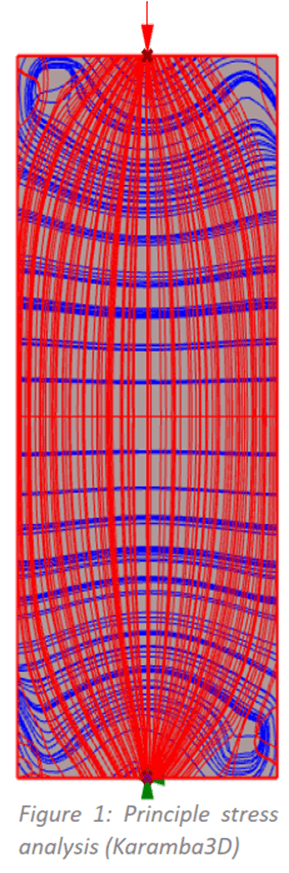
In lightweight structures, material is placed according to the flow of forces. Therefore, the flow of forces and principle stresses were studied by a FEM-analysis. Furthermore, it was found that buckling is the governing failure mechanism for slender structures loaded in axial compression. From this study, the three optimization goals were found, namely, minimize mass and internal elastic energy, and maximize resistance against buckling. This literature study resulted in a set of parameters, which were used to set up the numerical model in the parametric modelling software Rhinoceros, through a script written in Grasshopper.
NUMERICAL OPTIMIZATION
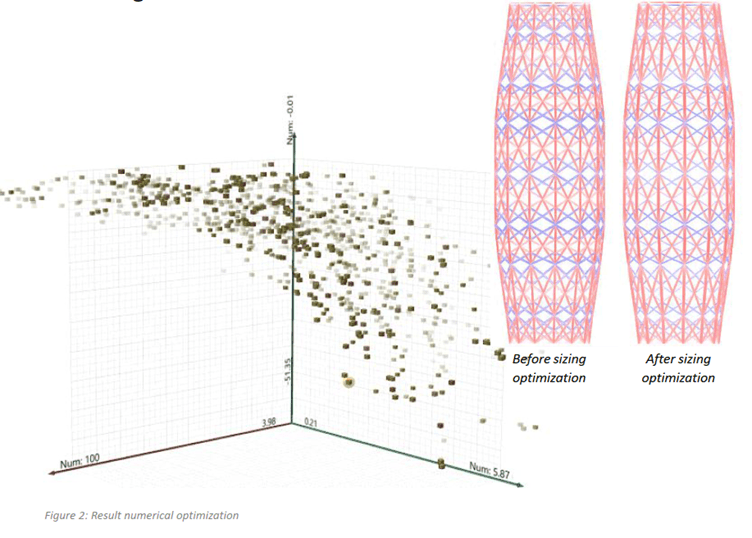
The Multi-Objective Evolutionary Optimization plug-in Octopus was used to find the optimized geometry for the three fitness function values. The result is a range ofoptimized trade-off solutions between the extremes of each goal. The solution closest to the origin is found to be the most optimal lightweight structure to take an axial compressive force. After the optimized geometrical design was found, a sizing optimization was conducted to optimize the number of ropes for each line. This is an iterative process, where the mass is redistributed based on the strain energy. As a result, the number of ropes increases for highly stressed lines and decreases for less stressed lines, resulting in a final design with a slightly decreased mass and an increased stiffness and buckling resistance. The final design refers back to the conducted FEM-analysis. Consequently, the final design is based on the flow of forces.
.
ROBOTIC FILAMENT WINDING
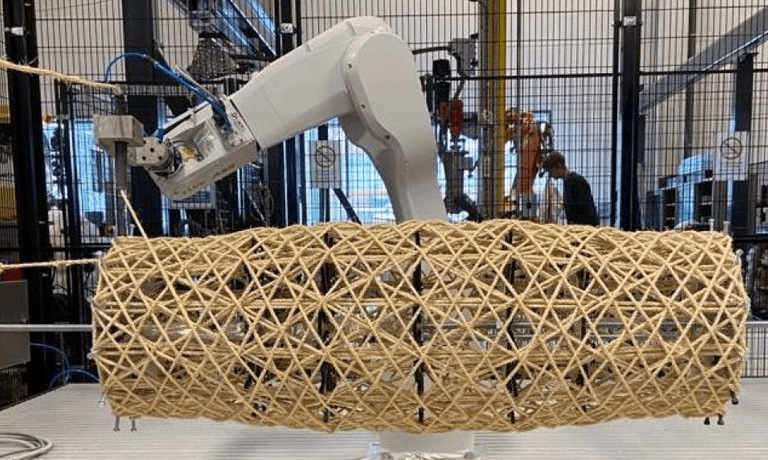
After finding the optimized column design, a winding path was determined allowing the column to be manufactured in one continuous winding session. For this path, it was taken into account that the vertical lines need to be winded before the diagonals to maximize the number of contact points and reduce the fibre span, to increase the buckling resistance of the column. Robot Components was used to combine all actions with the moveable work object and ABB IRB 1200-5/0.9 robot. The moveable work object ensures that each target point is located at the top, which prevents the robot from moving around the structure. The resulting RAPID-code was loaded into Robot Studio to simulate the complete winding path and manufacture the structure.
The optimized structure is manufactured using 4 mm three-strand sisal rope, impregnated with SR InfuGreen 810 / SD 8824 epoxy resin. The sisal rope was unwound from the spool and guided through a resin bath, after which the impregnated rope was tensioned by a rubber and directed to the end effector. The end effector winds the impregnated sisal rope around a non-structural formwork that is manually connected to the moveable work object.
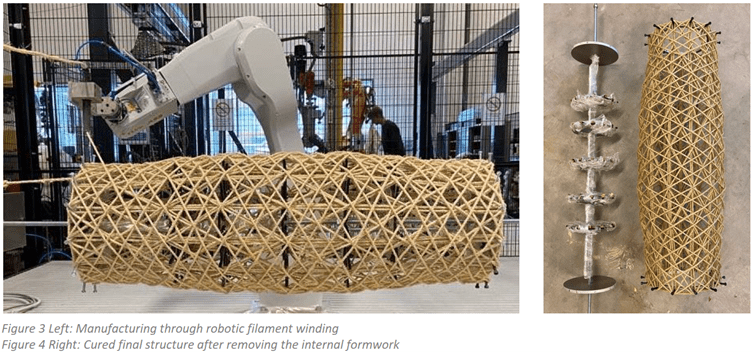
The manufactured columns were post-cured at 40 degrees Celsius for 8 hours. After curing, the non-structural formwork was removed, and the columns were tested in axial compression. The maximum force reached was 21.4 kN. The numerical result for the buckling load factor was 1.87 times higher than the average force at which local buckling started to occur. Since the filament-winded columns are not one single element but an interaction of multiple elements, local buckling occurs before the column buckles globally.
It can be concluded that it is feasible to manufacture a numerically optimized column design through robotic filament winding using biobased sisal rope. Besides some imperfections, the structural behaviour of the winded columns was promising. Further research should be conducted to reduce imperfections and conclude whether robotic filament winding with sisal rope is suitable for large-scale structural purposes.