Student : Thijmen van de Goor
Supervisors : Arjan Habraken, Faas Moonen, Susanne Bron – van der Jagt
When it comes to building materials, timber is highly in demand. This can also be seen in the application of floors, more and more different types of timber floor systems are created and applied in buildings. For light floor structures like timber floors, the vibration response is high. This can be explained by the amplitudes of response that are inversely proportional to the self-weight of the structure. Therefore, vibrations such as human induced vibrations (i.e. walking, running etc.) cause an issue for timber floors, due to the low self-weight of the floors.
As a starting point, the vibrational performance of timber floor systems is investigated through a case study on different types of timber floor systems. In this case study, the influence of different parameters on the vibrational performance of the floor will be analysed. From this case study it was found that vibrations are mainly controlled by the parameters fundamental frequency, modal mass, and damping. A higher frequency, which is obtained by increasing the stiffness of the floor, decreases the sensibility of vibrations. By increasing the modal mass of the system, the amplitude of the vibrations is decreased . An example of an exited mass, that being the mass that is exited during a vibration, is shown in the video below. For both situations, more materials were required to meet the requirements on vibrations. To decrease the use of additional materials, masses or dampened masses can be strategically placed in the system. The strategic mass will be implemented and analysed using finite element modelling in the next phase.
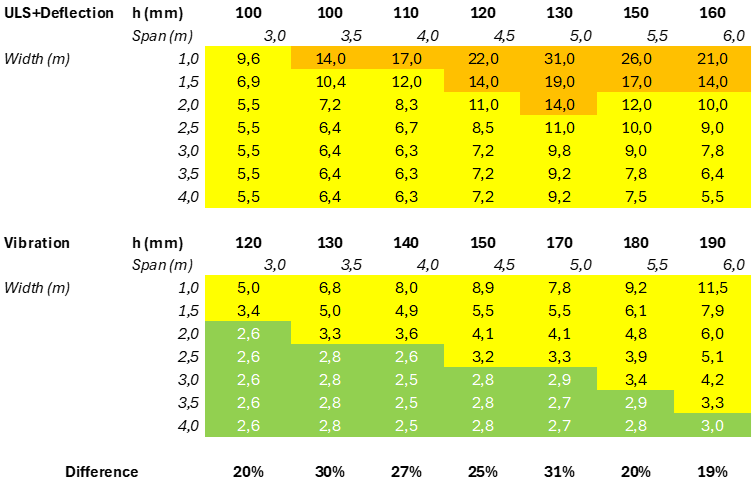
“An analytical analysis of the vibrations of the floor systems is performed based on the OS-RMS90 method. The OS-RMS90 value is dependent on several parameters: the fundamental frequency, modal mass, and damping of the floor system.
This analysis is performed for four different floor systems: CLT, Lignatur, Joist, and Kerto Ripa floor systems. For each floor, a structural height is chosen based on the ULS state and deflection criteria, resulting in an OS-RMS90 value. After that, the structural height of the same floor system is increased to meet the required class. An example of this analysis can be seen for a CLT floor in the table below.
For a Lignatur floor, for instance, the transverse stiffness is relatively low in comparison to the longitudinal stiffness, meaning the effective width is also small, resulting in a negative effect on the vibrational performance. For CLT, the transverse stiffness is relatively large, meaning that more modal mass is activated during vibrations, keeping the increase in structural height smaller.”
Using the software GSA, the floor elements can be analysed using a footfall analysis. The footfall analysis yields multiple values to analyse the performance of the floor: peak acceleration, RMS acceleration, peak velocity, and RMS velocity. These are the main values used to assess the vibrations performance of a floor. This analysis is used to test the effect of the strategically placed mass on the floor systems.
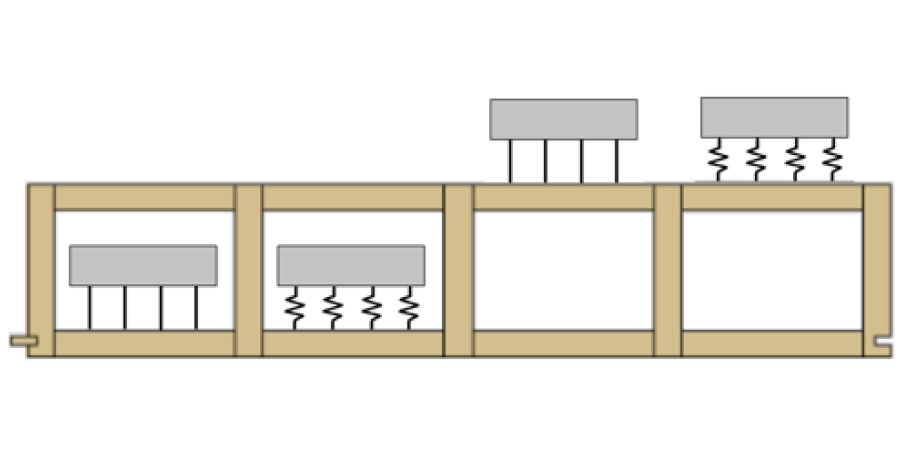
When looking at strategically placed mass, the goal is to only place mass at locations where it is needed the most. This is at the locations where the mass acts as modal mass. For a floor spanning in one direction, placing the mass in the middle of the floor is the most effective, due to the shape of the deformations. With this it can be found that only the middle 66% of the floor area needs to be covered with mass. When the mass is concentrated towards the middle of the floor, a decrease in mass of 36% on average can be found for a Lignatur floor. When applying this in practice, only a decrease of 33,33% is possible. This is due to the fact that the volume of the mass will not fit inside the floor for highly concentrated mass.
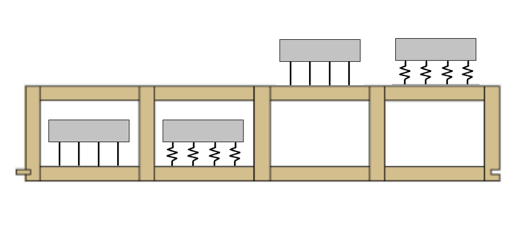
Mass can also be placed on springs, to create a damped system. The mass on springs can theoretically reduce the additional mass by 50,00%. However, practically this would result in a complex spring system, because this requires a very low spring stiffness, meaning a large displacement of the mass, which will not fit in a floor system. A reduction of 25,00% is possible with a higher spring stiffness. This solution is practically possible, because the displacements are limited. The combination of both optimisations methods results in an even larger decrease of additional mass for the Lignatur floor system. This however is a theoretical reduction, while this solution would take up too much space inside the floor system.
